Counting 20 cutting-edge technologies in the robot industry
The Institute of Electrical and Electronics Engineers (IEEEE) introduces 20 robotics technologies from the International Conference on Robotics and Automation (ICRA) in Stockholm, Sweden, with a focus on innovative solutions to some of today's robotics applications. The problem is mainly focused on control, sensing, driving, operation, grasping, prosthetic, humanoid balance, exoskeleton, flight taking, artificial intelligence, virtual reality, organizing micro-robot team and so on.
1. Calibrate the map with visual whisker sensing - bionic tentacle robot
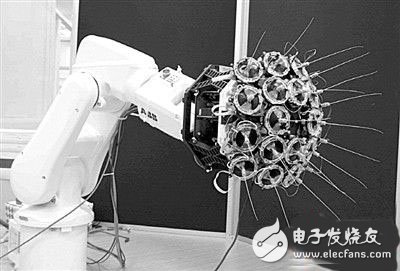
For tactile robot systems that are going to work in the real world for a long time, automatic error correction calibration is a prerequisite for long-term stability, and Bellabot is such a robot. It is like a large "flip eye" made up of many "eyeballs". Each "eyeball" sticks out a bionic tentacles, driven by electric artificial muscles, providing visual error feedback through the camera, and a standard industrial robotic console.
The researchers installed an adaptive filtering model that simulates cerebellar function, calibrating operational errors through visual whisker sensing maps, and improving the accuracy of manipulating robot directional motion. Operational tolerance or sensor array damage can cause image defects, and Bellabot can continuously adjust the defects in the sensor map through learning algorithms.
2. The rib line drive structure is flexible - elastic humanoid spine
The human spine is stabilized by ligaments, intervertebral discs and muscles, with high strength and flexible rotation. Mimicking this performance helps the robot maintain mechanical stability in an unknown environment. To this end, the researchers proposed a continuous mechanism based on silicone and ribs.
This mechanism can be used as the neck or torso of a robot, more concentrated in the neck. In order to verify the functions, the researchers designed a multi-degree-of-freedom prototype to simulate human neck movement through elastic ribs, which will help design the robotic cervical spine in the future. It can also be used as a test platform to develop a mechanical-like control scheme.
3. Sharing heavy load - micro robot team
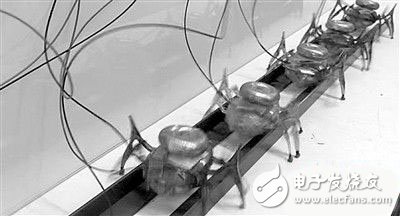
This is a team of many small robots. The researchers proposed a simple statistical model that predicts the team's overall maximum pull and estimates the sum of the functions of each small machine insect interacting with the ground, such as running or walking on the ground.
Three teams were tested through experiments, one was a small reptile that was driven by bristles, a small 6-footed insect that would walk slowly and run fast, and a 17-gram miniature multi-footed robot μTug that was moved by two wheels. They can share the heavy load. For example, each μTug can operate within its own limits, and the tension generated by six groups can exceed 200 Newtons.
4. The rib line drives to grip a variety of objects - wearable polymer gloves
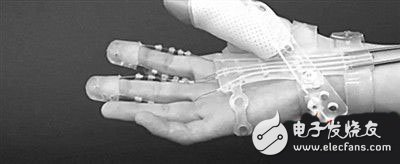
This is a wearable machine glove made of polymer material and ribbed. It can be placed on the thumb, index finger, middle finger and wrist. It is also called Exo-GlovePoly. In the design and manufacture, the outer glove body can also be adjusted according to the size of different hands to protect the user from injury, and the air permeability is good, and the Teflon tube can be embedded to install the circuit.
It has two motors, one on the thumb and the other on the index or middle finger. The researchers asked a healthy volunteer to do a grip test to test the mechanical properties of the glove, and to grasp objects of different shapes and sizes through a connected pressure sensor and drive mechanism.
5. Ability to balance with the environment - legged robot TORO

Legged humanoid robots can perform a variety of tasks. They must be able to interact with the environment and reverse their body when faced with external obstacles while maintaining a stable and coordinated balance.
To this end, the researchers proposed a new control method that combines multiple levels of control and balance. They simulated this method on the humanoid robot TORO. In order to achieve the right balance, all task forces/torques are first assigned to the end effector and then mapped to the connection space according to the task level.
6. Multi-mode flight pick-up - aircraft with automatic suction cup
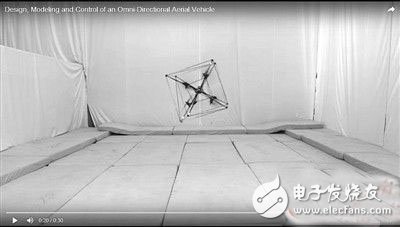
The researchers installed their patented technology, the automatic close suction cup, and considered the load vacuum pump to solve the multi-mode flight pick-up problem. Using the adsorption principle and local contact tension, passively drive the objects of different shapes. This automatic suction "hand grip" can also use one or more suction cups to make the aircraft "multi-talent" in capturing and carrying objects, such as grabbing one and then grabbing the second.
The researchers pointed out that aircraft are generally very sensitive to weight restrictions, they use a micro-pump vacuum generator, but this brings new challenges to the system. To overcome these problems, they tested the suction cup design for any leaks, driving forces, maximum grip, and tested the performance of each "hand" part, the ability of the aircraft to transmit the force to the suction cup, and the system to absorb the inclined surface. The ability to finally test the aircraft's ability to grab multiple objects with multiple suction cups.
7. "Pine" that can move by itself - TransHumUs mobile machine platform

TransHumUs appeared at the 56th Venice Biennale recently. It is the three moving pine trees that wandered in the French Pavilion and Green Fort Park. The original intention was to release the trees from their fixed roots and show the power of free life.
TransHumUs demonstrates that advanced mobile robotics can also contribute to the development of contemporary art. At the robotics conference, the researchers revealed how to let the pines move freely from a technical perspective. The challenge is to design the initial machine platform so that the trees can move according to their metabolism.
Pattern Braided Sleeve,Wire Sleeving,Expandable Braided Sleeving,Cable Wrap Sleeve
Shenzhen Huiyunhai Tech.Co., Ltd. , https://www.cablesleevefactory.com