Intelligent vehicle control system based on electromagnetic sensor path recognition
1 The overall design of the system
1.1 The overall structure of the system
The hardware framework of the system is shown in Figure 1. The system takes Freescale's 16-bit microcontroller MC9S12XS128 as the control core, and consists of a power management module, a track information acquisition module, a vehicle speed detection module, a motor drive module, a steering gear control module, and a debugging module. The single chip microcomputer collects the road information through the electromagnetic sensor, according to the analysis of the algorithm to get the deviation of the smart car from the track at this time, and then uses a certain control algorithm to control the steering of the smart car's steering gear and the speed of the DC motor, thereby achieving intelligence Automatic identification and tracking of car-to-path.
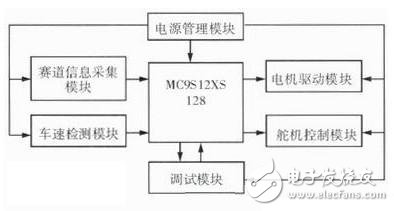
Figure 1 System hardware framework
1.2 Introduction to MC9S12XS128 chip
The characteristics of MC9S12XS128 microcontroller are: the use of enhanced 16-bit S12XCPUV2, on-chip bus clock up to 40MHz; with 128 k Flash, 8 k RAM and 8 k EEPROM memory, with 2 SCI, 1 SPI, 1 8-channel timer, two 8-channel A / D ports with adjustable conversion accuracy, one 8-channel PWM module, 91 discrete digital I / O ports, and one MSCAN module. The chip has the characteristics of fast speed, strong function, low cost, low power consumption, etc. It can realize the functions of controlling the motor speed, steering gear response, speed acquisition, path recognition and so on.
2 The hardware design of the system
2.1 Power management module
The function of the power management module is to regulate the voltage of the battery and provide a reliable working voltage for the normal operation of each module. In addition to considering the voltage range and current capacity, the design also needs to be optimized in terms of power conversion efficiency, noise reduction, and interference prevention. The power supply of all hardware circuits of this system car is provided by 7.2 V, 2000mAh nickel-cadmium battery. Because the working voltage and current capacity required by different circuit modules in the circuit are different, the rechargeable battery voltage is converted into three files of 3.3 V, 5 V and 7.2 V. The relationship between each module and the power supply is as follows Figure 2 shows. Among them adopt LM2596-5.0 as the voltage stabilizing chip of 5 V, adopt LM2596-3.3 as the voltage stabilizing chip of 3.3 V, the circuit diagram is shown as in Fig. 3.
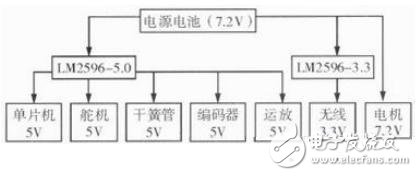
Figure 2 Power system structure diagram
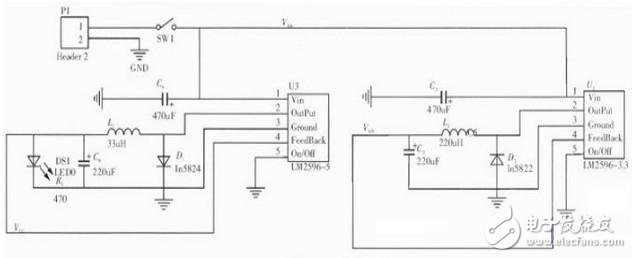
Figure 3 Circuit diagram of the power module
2.2 Track information collection module
The track information collection module is an important source of system information input, which is equivalent to the "eyes" of the smart car. It is mainly responsible for outputting the track information of the current or front position of the car to the main control chip for processing; this system uses 4 electromagnetic sensors to collect the raceé“ ä¿¡æ¯ã€‚ Road information.
2.2.1 Component selection
The principle of the electromagnetic sensor detecting track information is to detect the track signal through an LC resonance circuit composed of an inductor and a capacitor, and then amplify the detected signal through an operational amplifier LM358. Since the frequency that the car needs to recognize is 20 kHz, the resonance In the circuit, select 10mH of fine winding inductance, 6.8 nF low-frequency ceramic dielectric capacitor.
Earphone For Mobile Phone advantage:
Enriched sound and reliable quality in all aspects of their design,Strong bass generated from powerful driver,power and great sensitivity response,Their uniquely contoured body allow for a 45 degree in-ear angle which offers ergonomic comfort and noise isolation better than standard headphones,Stylish color design with mic and volume controller, CE and FCC marks, EN71, WEEE, ROHS AND REACH IF NEEDED
Earphone For Mobile Phone
Earphone For Mobile Phone,Plug Double Online Headphones,Bluetooth Headset,Stereo Headphone
Dongguan City Leya Electronic Technology Co. Ltd , https://www.dgleya.com