Analysis: Analysis of current status of sweeping robots and future development trends
At present, the sweeping robot has become the "toon" in the field of service robots. This year's double eleven, the major brands of sweeping robots have earned a lot of fun. But behind the "money tree" of this scenery, how much technology is hidden? In the future, where will it go? A glimpse of this article.
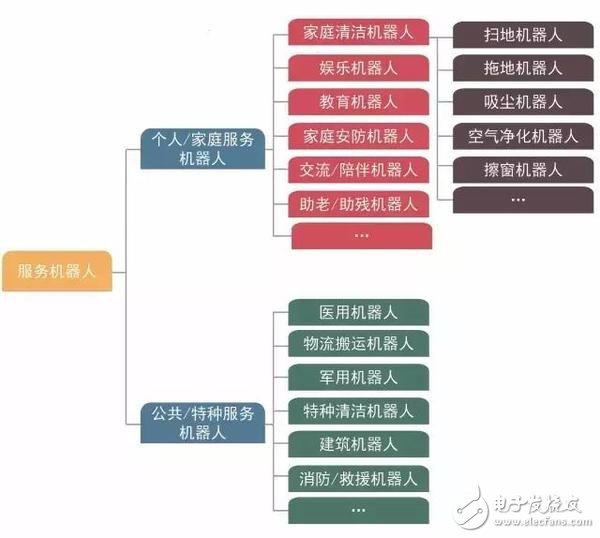
After long-term development, industrial robots have been relatively mature in technology, but service robots have received the attention of researchers and enterprises in recent years, and gradually entered the ordinary people's families, and their development history is relatively short. At present, the academic community does not have a strict definition of service robots. The service robot outlined by the International Federation of Robotics (IFR) is defined as: A service robot is a semi-autonomous or fully autonomous robot that can perform service work that is beneficial to human health.
Service robots are used in a wide range of applications, such as education, entertainment, special (security, military), shopping guide, hospitality, medical, finance, logistics, e-commerce, business secrets, etc. Among them, the household cleaning robot is the kind of service robot with the largest number of sales and the widest application range at the current stage. There are many types of household cleaning robots, including sweeping robots, mopping robots, window cleaning robots, air purifying robots, and vacuum robots. The sweeping robot is the most important member of the household cleaning robot, and the market share is over 96%.
The demand for service robots has surpassed that of industrial robots, showing a stronger market demand and providing a broader market imagination.
Service robots can meet some of the actual needs of people's daily lives, and most markets are priced in the range of a few hundred dollars to several thousand dollars. In recent years, the market scale has exploded. According to IFR statistics, global service robot sales reached 3.3 million units in 2014, with sales of approximately $1.2 billion, a year-on-year increase of 24%. Sales of service robots are expected to increase significantly between 2015 and 2018, with cumulative sales reaching 25.9 million units and sales expected to reach $12.2 billion. At the same time, according to the predictions of relevant research units in China, the scale of China's service robot market is expected to exceed 20 billion yuan in 2017.
Development status of sweeping robotWith the advancement of science and technology and social development, especially due to the acceleration of the pace of life and the increase of work pressure, people hope to be more free from the cumbersome daily cleaning of the family. This is undoubtedly the market demand for cleaning robots into the family.
As a kind of cleaning robot, the sweeping robot is aimed at all households. The demand pain point is precisely to make people liberate from the daily floor cleaning work, which caters to the needs of market pain points. The earliest sweeping robots came from the vacuum cleaner industry led by Electrolux and Dyson.
In 2002, Electrolux developed the “Trilobite†sweeping robot based on the original high-quality vacuum cleaner – the world's first fully automatic sweeping robot. Subsequently, iRobot produced 7 generations of housekeeping robot Roomba, which became the representative product series in this field.
Around 2010, domestic sweeping robot brands have emerged and gradually realized industrialization. At present, the domestic market has dozens of sweeping robot brands, such as Cobos, iRobot, Fomat, Dibei, Xrobot, Haier, Midea, Prosenic, Philips and Samsung. However, the number of sweeping robot companies that have been established locally and have core R&D capabilities are not high.

In recent years, sweeping robots are spreading at an alarming rate, and the market is developing very rapidly. In the early stage of development, sweeping robots mainly focused on improving sweeping performance. At this stage, after ensuring the provision of better cleaning results, the sweeping robot is bound to shift to the development direction of intelligent core technologies such as multi-sensor fusion, navigation and path planning.
Sweeping robot key technologyThe basic functions of the sweeping robot visible to the user are cleaning, vacuuming, mopping, etc., so the materials, structure, rotation speed/method of the cleaning brush, and the principle of vacuuming, the form of the suction mechanism, the mop material, and the mop. Basic functional principles and technical aspects such as layout, water supply, and water supply are continuously optimized. At the same time, in order to achieve better cleaning results and a better user experience, the sweeping robot involves the following key technologies in the field of artificial intelligence.
Multi-sensor information fusion technologyMulti-sensor information fusion refers to the synthesis of sensory data from multiple sensors to produce more reliable, accurate or more comprehensive robot status information, such as fusion of laser radar, ultrasonic sensors, infrared sensors, odometer information, etc. in sweeping robots. . The basic principle of multi-sensor information fusion processing is similar to the process of human brain processing information. It can reduce the influence of various single sensors on space and time limitations through reasonable analysis and use of feedback information of various sensors. The analysis of the remaining information further reflects the characteristics of the detected object more accurately and more accurately, eliminates the uncertainty of the information, and obtains a consistent result with high feasibility for the observed environment.
Indoor navigation and positioning technologyThe sweeping robot needs to move autonomously. Whether it is local real-time obstacle avoidance or global planning, it is necessary to accurately determine the current state and position of the robot or obstacle to complete tasks such as navigation, obstacle avoidance and path planning. Generally, the robot realizes the navigation and positioning of the indoor mobile robot through the dead reckoning method, the beacon positioning method and the hybrid positioning method.
The dead reckoning method is the most commonly used method. The robot's own odometer, gyroscope, accelerometer and other internal sensors can solve the speed and attitude information of the robot in real time. With the starting point as the absolute zero point, the position and posture of the robot can be calculated progressively and cumulatively. With the increase of working time, the error caused by the integral operation error and the timing system time difference will gradually accumulate, so it is not suitable for precise positioning for a long time.
The movement of the sweeping robot on the indoor floor can be regarded as the movement in a two-dimensional plane. If the beacon is allowed to be placed indoors (such as a charging post or other marker that satisfies the beacon condition), the robot and the beacon can be detected by the sensor. The relative distance and posture between the two achieve the indoor navigation and positioning of the sweeping robot. The advantage of beacon positioning is that it can realize real-time detection, no accumulated error, good precision stability, and can be position-aligned with each other through multi-beacon redundancy coverage or when a certain beacon fails, the robot can still succeed. Positioning.
The hybrid positioning method combines the advantages of the dead reckoning method and the beacon positioning method.
Path planning algorithmDuring the working process, the sweeping robot needs to cover the cleaning area as much as possible and the walking paths do not overlap. This requires optimal path planning according to one or some optimization criteria, and find a starting point from its starting position. The target state can avoid the optimal path of the obstacle.
According to the degree of grasp of environmental information, we can divide path planning into global path planning based on known maps and local path planning based on sensor information. Among them, in terms of whether the obstacle information is static or dynamic, the global path planning belongs to static planning (offline planning), and the partial path planning belongs to dynamic planning (online planning).
The global path planning needs to establish a detailed map of the workspace, and the path planning is performed according to the environmental information contained in the map; the local path planning determines the location of the location map and the distribution of the local obstacles according to the surrounding environment information collected by the sensor in real time, so that Select the optimal path from the current node to the neighboring sub-target node.
Common path planning algorithms include artificial potential field method, Dijkstra algorithm, Floyed algorithm, SPFA algorithm (Bellman_Ford improved algorithm), A* algorithm, D* algorithm, DWA algorithm, graph theory shortest algorithm, genetic algorithm, cellular automata algorithm, Immune algorithm, tabu search algorithm, simulated annealing algorithm, artificial neural network algorithm, ant colony algorithm, particle swarm algorithm.
Sweeping robot technology development trend, cost-effective, high-performance sensor fusion applicationAt present, sweeping robots mostly use infrared sensors, contact sensors, ultrasonic sensors, etc., and a few high-end models use line-scanning lidar sensors. For the needs of intelligent sweeping robots for indoor positioning and complex path planning, the information provided by the sensors is still insufficient.
In the future, high-performance, new-type sensors such as vision sensors (deep camera, bionic vision, structured light sensor), low-cost high-performance lidar sensors, and software anti-collision contact sensors will provide richer reference information for sweeping robot decision-making. . At the same time, at the algorithm level, it is necessary to dig deep into the multi-sensor information fusion processing algorithm, extract effective information in the complicated sensor feedback information, and make decisions according to the optimization strategy rules.
Modular integration of home functions for intelligent multi-tasking of sweeping robotsOn the basis of the basic functions of sweeping, vacuuming and mopping the sweeping robot, modular integration, such as air purification, humidification, communication, indoor toys, children's writing board and other functional modules, to achieve a special intelligent sweeping robot More use. The body of the sweeping robot can be platformized, that is, realize the function of the indoor intelligent mobile platform, and has the functions of basic obstacle avoidance, path planning, software and hardware interaction interface, and other functions are loaded in a modular form, giving users more autonomy. Choose the room to expand the market segment.
Intelligent level improvement, intelligent algorithm development applicationWith the development of speech recognition technology and image processing technology, such as the deep research of sound source localization and voiceprint recognition technology, the maturity of face recognition technology, and the improvement of the performance of item recognition technology, we can more effectively improve the cleaning environment of the robot to the home environment. The degree of integration enhances the intelligent interaction of sweeping robots and family members.
At the same time, we should research and design various intelligent human-machine interfaces, such as multi-lingual speech, natural language understanding, image, handwriting recognition, etc., to better adapt to different users and different application tasks, and improve the harmony between human and robot interaction. Sex, realize the simplification, diversification, intelligence and humanization of human-computer interaction.
As the most popular home service robot at this stage, the intelligent sweeping robot will be able to self-learn the language in the future and learn from others in a socialized environment, transforming this language ability into the ability to learn and handle problems autonomously. In the future, robots will acquire more autonomy and realize the essential innovation and development of intelligent sweeping robot function positioning.
Sweeping robot network nodeAt present, some intelligent sweeping robots have realized remote control functions through network connection. Some sweeping robots have also installed surveillance cameras to realize remote security monitoring. The small size and movable nature of the sweeping robot has become its unique advantage as a network terminal node, which can extend various network node functions such as remote security, smart home, video/voice communication terminal, health assistant, and companion chat.
Promising prospectsThe sweeping robot market is in a period of continuous development. In order to continuously improve the user experience and the need to fit the actual functions, the sweeping robot will continue to evolve and enhance, and will continue to develop in the aspects of converged sensing systems, functional positioning, intelligence, network services, and multi-machine collaboration and self-learning. To realize the true meaning of the sweeping robot, and to make the sweeping robot develop into a high-tech partner for people.
Nantong Boxin Electronic Technology Co., Ltd. , https://www.ntbosen.com