ARM is the core embedded speech recognition circuit module design
Service robots are service-oriented, so people need a more convenient, natural, and more humane way to interact with the robot, rather than being satisfied with complex keyboard and button operations. Hearing-based human-computer interaction is an important development direction in this field. The current mainstream speech recognition technology is based on statistical models. However, due to the complexity of the statistical model training algorithm and the large amount of computation, it is generally completed by the industrial computer, PC or notebook, which undoubtedly limits its application. Embedded voice interaction has become a hot topic in current research. Compared with the speech recognition system of the PC, the embedded speech recognition system has certain limitations in its computing speed and memory capacity, but it has the advantages of small size, low power consumption, high reliability, small investment, and flexible installation. In the fields of smart home, robotics and consumer electronics.
The core processing unit of the module uses ST's 32-bit processor STM32F103C8T6 based on ARM Cortex-M3 core. This module takes the dialogue management unit as the center, realizes the voice recognition function through the hardware unit with LD3320 chip as the core, and adopts the embedded operating system μC/OS-II to realize unified task scheduling and peripheral device management. After a large number of experimental data verification, the speech recognition module designed in this paper has the advantages of high real-time performance, high recognition rate and high stability.
Speech recognition circuit
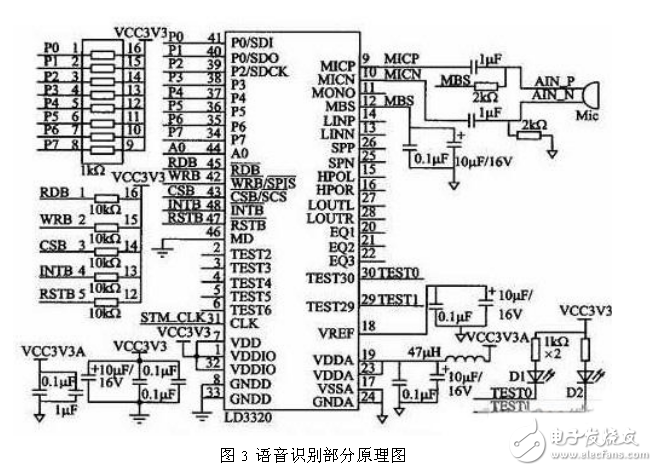
Figure 3 is a schematic diagram of the speech recognition part, which is designed with reference to the LD3320 data sheet published by ICRoute. The LD3320 integrates a fast and stable optimization algorithm, which does not require external Fla-sh and RAM. It does not require user training and recording to complete non-specific speech recognition, and the recognition accuracy is high. In the figure, LD3320 is directly connected to STM32F103C8T6 in parallel mode, and all use 1kΩ resistor pull-up. A0 is used to judge whether it is data segment or address segment; control signal, reset signal and interrupt return signal INTB are directly connected to STM32F103C8T6, using 10kΩ resistor Pull, the auxiliary system works stably; the STM32F103C8T6 uses the same external 8 MHz clock; the LEDs D1 and D2 are used for the power-on indication after reset; the MBS (pin 12) is used as the microphone bias, and an RC circuit is connected to ensure Output a floating voltage to the microphone.
5.1 Home Theater Speaker,Home Theatre 5.1,Wireless Surround Sound Speakers,Bluetooth Surround Sound System
GUANGZHOU SOWANGNY ELECTRONIC CO.,LTD , https://www.jerry-power.com