The current status and future development trend of machine vision
Deep learning is one of the hotspots of artificial intelligence, which will push us to a new level of control design and industrial Internet of Things. Machine vision is extremely important in the field of industrial control, with which data-driven deployment of complex machines and equipment is used.
To better serve its target customers than its competitors, today's embedded design teams are looking for new technologies such as machine learning (ML) and deep learning (DL) to develop and deploy complex machines on time and on time with limited resources. And equipment. With these technologies, teams can build complex single-system or multi-system models using data-driven methods. The ML and DL algorithms do not use a physics-based model to describe the behavior of the system, but rather infer the model of the system through the data. The traditional ML algorithm is suitable for dealing with cases where the amount of data is relatively small and the complexity of the problem is low. But what if it is a big data problem like autonomous cars? Solving this challenge requires DL technology. This article describes how this emerging technology will drive us into the next era of control design and industrial Internet of Things (IIoT) applications.
1 ML technology in the application of industrial asset status monitoringFirst consider the application of machine learning (ML) technology in industrial asset condition monitoring. ML helps transform state-based monitoring applications from passive maintenance and preventive maintenance to predictive maintenance. These techniques are often used to detect abnormal behavior and diagnose problems, and to some extent predict the remaining useful life of industrial assets such as motors, pumps and turbines.
The ML-based model development and deployment process is shown in Figure 1.
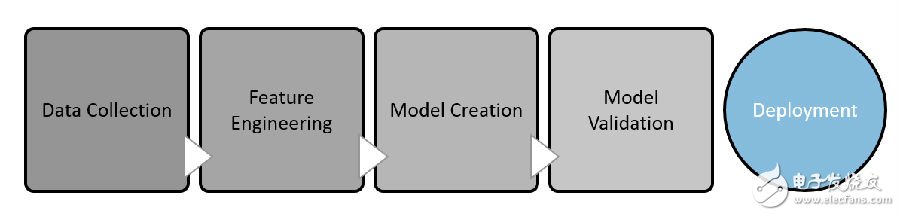
Figure 1 Machine learning based analysis process
See how this workflow is used to monitor the health of the motor. Data is collected from various types of sensors, such as accelerometers, thermocouples, and current sensors connected to the motor. Feature engineering steps usually consist of two parts: feature extraction and feature reduction. Feature extraction is used to derive information from raw data (or waveforms) that helps to understand the health of an asset. For example, the spectrum of the current signal from the motor is embedded with information that can be used to detect the fault, as shown in Figure 2. The average amplitude over different frequency bands in the spectrum can be used as a feature extracted from the current signal. Features extracted from multiple sensors may contain redundant information. Feature reduction methods such as principal component analysis (PCA) can be used to reduce the number of features that are ultimately used to build the model. The reduced number of features means that the complexity of the ML model to be used is reduced. The reduced feature set is represented as a vector (or array) and is entered into the ML algorithm, which will be used in the model creation step. Model creation and validation is an iterative process in which you can experiment with several ML algorithms and choose the one that works best for your application.
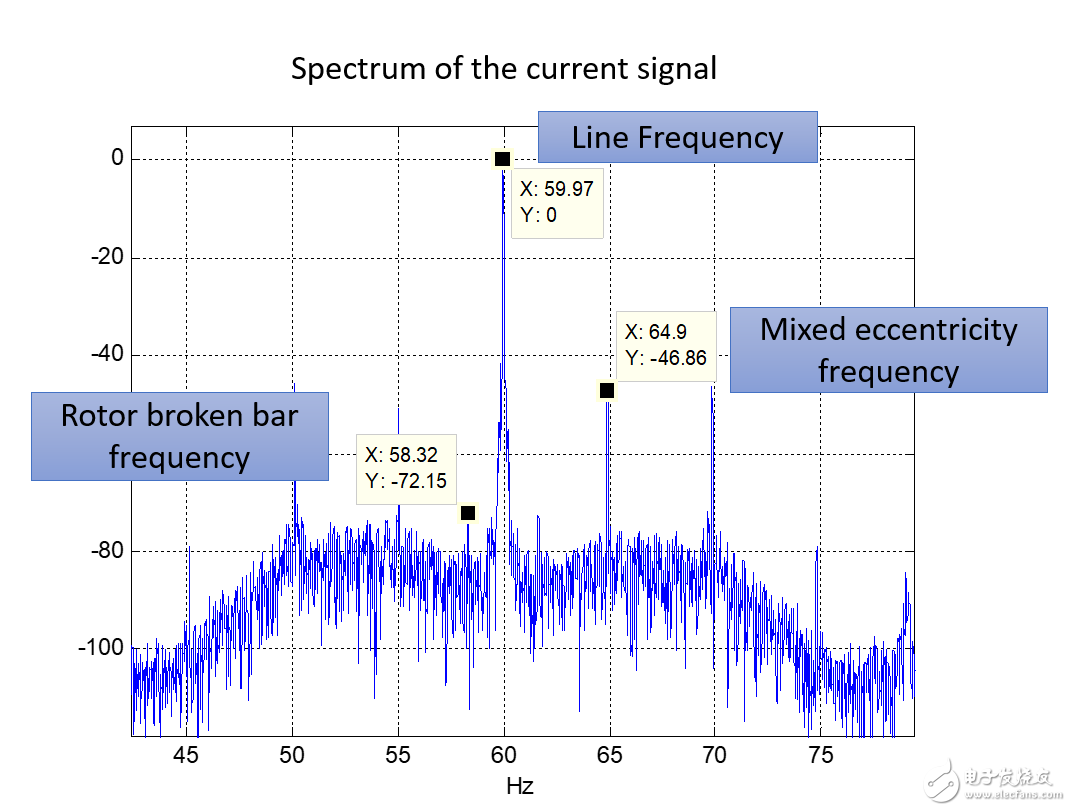
Figure 2 Characterization of the motor current signal
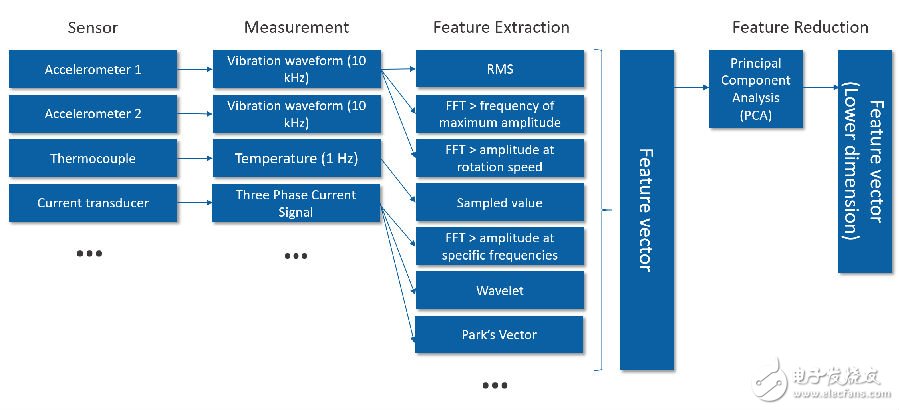
Figure 3 Feature Engineering
Unsupervised ML algorithms such as the Gaussian Mixture Model (GMM) can be used to simulate the normal behavior of the motor and detect when the motor begins to deviate from its baseline. Unsupervised methods can discover hidden patterns in data without marking the data. Unsupervised technology is mainly used to detect motor anomalies, and supervised algorithms are used to detect the cause of anomalies. In a supervised approach, the algorithm is represented by a combination of input data and expected output. This data is called tag data. The algorithm learns the function to map the input to the output. The data used to train the ML algorithm contains features that are extracted under normal and error conditions. Features are clearly identified using a label that indicates the state of the motor. Commonly used supervised ML algorithms include support vector machine (SVM), logistic regression, and artificial neural networks.
The challenge of traditional ML technology is the feature extraction process. This process requires professional domain knowledge and is very error-prone, usually the point of failure in the ML workflow. Therefore, more and more people are adopting DL algorithms because they do not need to use feature engineering steps. The data collected from the sensor (original measurement data) can be directly input into the DL algorithm as shown below.
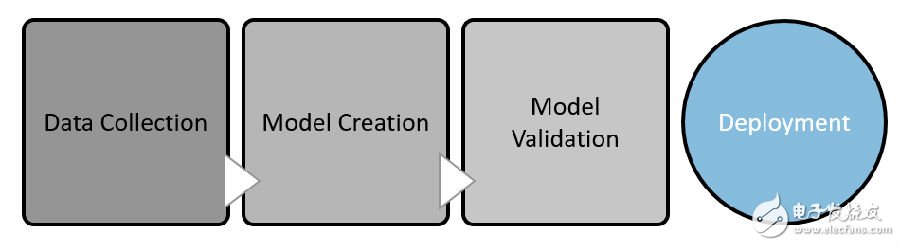
Figure 4 Deep learning workflow
The DL algorithm is based on an artificial neural network. Artificial neural network learning algorithms are inspired by the structure and function of biological neural networks. These algorithms use a form structure of interconnected compute nodes (artificial nerves), while compute nodes take the form of layers. The first layer is called the input layer and acts as a connection interface to the input signal or data. The last layer is the output layer, and the neurons in this layer output the final prediction or decision. There is one or more hidden layers between the input layer and the output layer (Figure 5). The output of each layer is connected to the nodes of the next layer by a weighted connection. The neural network learns the mapping between input and output by modifying these weights. By using multiple hidden layers, the DL algorithm can learn the features that need to be extracted from the input data without explicitly entering the features into the learning algorithm. This is called feature learning.
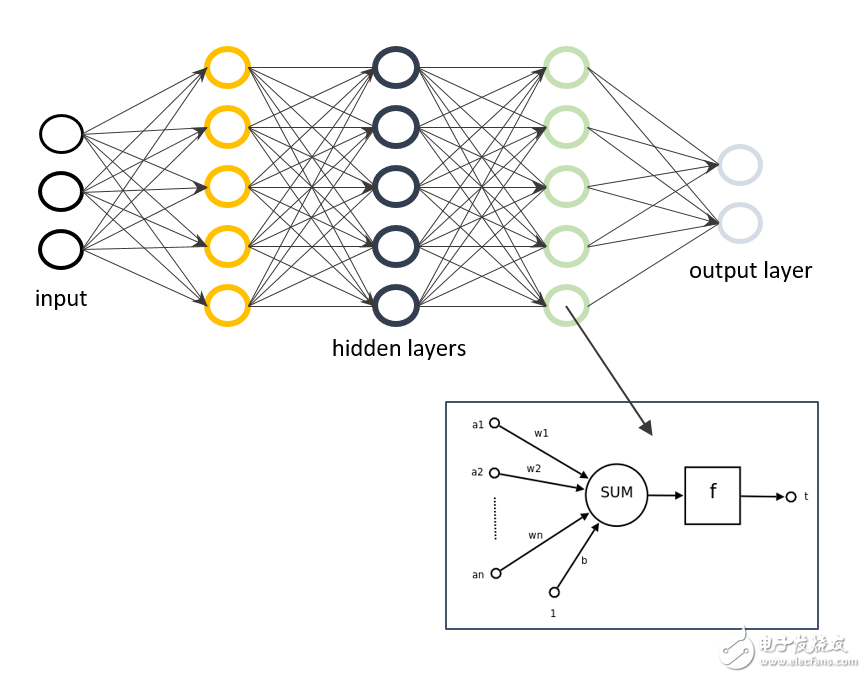
Figure 5 feedforward artificial neural network
Onlyrelx brand refillable disposable vape pen is portable and fashion disposable electronic cigarette, disposable ecigs pen are trending featured vape pen for vapors as it's safety and easy to use. Disposable vape pod,disposable vape, wholesale vape,vape wholesale,vape pen manufacturer and supplier.disposable vape pen,disposable electronic cigarette,disposable ecigs pen,disposable ecigs stick,disposable e-cigs pen,disposable vape factory,disposable vape pod,disposable vape device,vape pen,vape stick, vape wholesale,wholesale vape,customized dispsoable vape pen,customized vape pen,OEM&ODM disposable ecigs pen,disposable electronic cigarette wholesale, wholesale disposable electronic cigarette,distribute vape pen,vape pen distribute,high quality vape pen,high quality vape pod,rechargeable vape pod system,Pod System Vapes
Rechargeable Vape Pod System,Distribution Disposable Vape,Onlyrelx Vape Pen,Atomizer Device Vape Pen
Shenzhen Onlyrelx Technology Co.,Ltd , https://www.onlyrelxtech.com