Comparison of Differences and Features between FIR and IIR Filters
FIR is a finite impulse response; IIR is an infinite impulse response. One major difference between FIR and IIR filters is that FIR is a linear phase and IIR is a nonlinear phase (bilinear transformation). For the influence of the nonlinear phase, it can be considered that for the different frequency components of the input, the phase difference is not proportional to the frequency, and the superimposed phase condition of the different frequency components at the output and the input time change, and the obtained passband The signal is distorted.
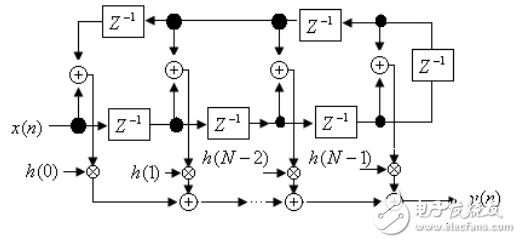
Figure 1. Linear phase filter that simplifies the number of multipliers
The IIR filter has the following features:
1. The system function of the IIR digital filter can be written in the form of a closed function.
2. The IIR digital filter adopts a recursive structure, that is, a feedback loop is provided on the structure. The IIR filter operation structure is usually composed of basic operations such as delay, multiplication by coefficient, and addition. It can be combined into four types: direct type, positive type, cascade type, and parallel type, all of which have feedback loops. Due to the rounding process in the calculation, the error is continuously accumulated, and sometimes a weak parasitic oscillation occurs.
3, IIR digital filter can rely on the results of mature analog filters, such as Butterworth, Chebyshev and elliptical filters, there are ready-made design data or charts to check, the design workload is relatively small, on the calculation tools The requirements are not high. When designing an IIR digital filter, we first write the formula of the analog filter according to the index, and then convert the formula of the analog filter into the formula of the digital filter through a certain transformation.
4. The phase characteristics of the IIR digital filter are not well controlled. When the phase requirement is high, a phase calibration network is required.
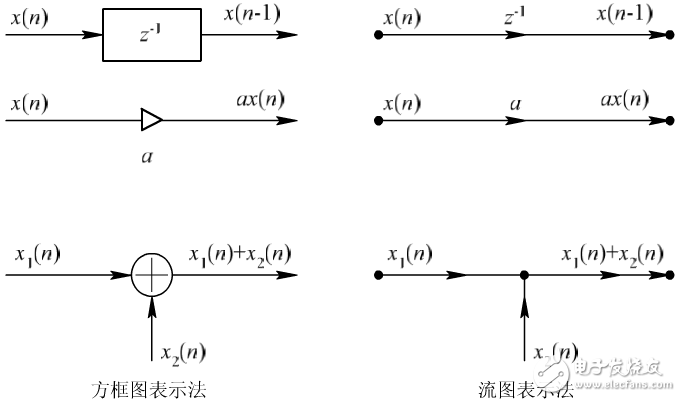
Figure 2 shows the representation of the IIR filter mechanism
Designing the IIR filter in matlab can design the Butterworth filter using the buttterworth function, designing the Chebyshev i-type filter using the cheby1 function, designing the Chebyshev II filter using cheby2, and designing the ellipse using the ellipord function. filter.
Unlike the design of the FIR filter, the order of the IIR filter design is not specified by the designer, but is based on the individual filter parameters (cutoff frequency, passband filter, stopband attenuation, etc.) input by the designer. The lowest filter order that satisfies these parameters is designed. Designing different types of IIR filters under matlab has corresponding functions for order selection.
The IIR unit response is an infinite pulse sequence and the FIR unit response is finite.
The IIR amplitude-frequency characteristic has high precision, is not linear phase, and can be applied to audio signals that are insensitive to phase information. The accuracy of FIR amplitude-frequency characteristics is lower than that of IIR, but the linear phase is that the signals of different frequency components are FIR-filtered. Their time difference does not change after the device. This is a very good property.
In addition, the limited unit response is also conducive to the processing of digital signals, easy to program, and the delay for calculation is also small, which is very important for real-time signal processing.
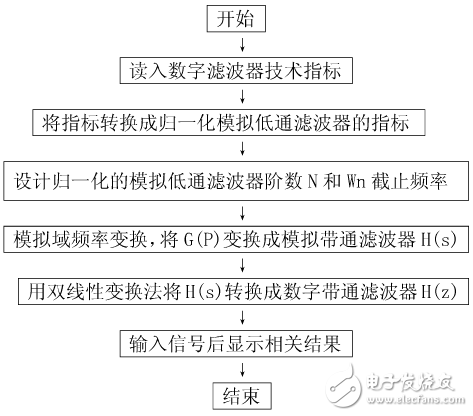
Figure 3 Flow chart of designing the IIR filter program under matlab
Comparison of IIR and FIR digital filters:
1, from the performance comparison
In terms of performance, the pole of the IIR filter transfer function can be located anywhere within the unit circle, so high selectivity can be obtained with a lower order, and fewer memory cells are used, so it is economical and efficient. But this high efficiency comes at the expense of phase nonlinearity. The better the selectivity, the more severe the phase nonlinearity. On the contrary, the FIR filter can obtain a strict linear phase. However, since the pole of the FIR filter transfer function is fixed at the origin (the output is only related to the finite input, the transfer function has a denominator of 1 and the pole is at the zero point), so it can only be used. The higher order achieves high selectivity; for the same filter design index, the order required by the FIR filter can be 5~10 times higher than the IIR filter. As a result, the cost is higher and the signal delay is larger. If the same selectivity and the same linearity requirements are used, the IIR filter must be added to the all-pass network for phase correction, which also increases the number of nodes and complexity of the filter.
2, from a structural comparison
The IIR filter must be recursive, and the pole position must be within the unit circle, otherwise the system will be unstable. In addition, in this configuration, this finite word length effect sometimes introduces parasitic oscillations due to rounding of sequences during the operation. On the contrary, the FIR filter mainly adopts a non-recursive structure, and there is no stability problem in theory or in actual finite precision operation, and the operation error is also small. In addition, the FIR filter can use the fast Fourier transform algorithm, and the operation speed can be much faster under the same order.
Cold-resistant Network Cable include CAT5E cold-resistant network cable, cat6 cold-resistant network cable, cat7 cold-resistant network cable.Cold-resistant network cables support the transmission frequency and the Channel Bandwith are same as the normal network cables.
The difference between the cold-resistant network cable and the normal network cable is the cold-resistant network cables can operate in temperatures of minus 40 degrees.
Cold-Resistant Network Cable,Cold-Resistant Corrosion-Resistant Spring Network Cable,Wire Electric Cable,Electric Wire
Shenzhen Kingwire Electronics Co., Ltd. , https://www.kingwires.com