Design of UAV Survey System Based on 32-bit ARM Processor
With the rapid development of remote sensing and communication technology, the design of micro drones has been gradually studied. Due to its high flexibility, information and adaptability to harsh environments, small unmanned aerial vehicles have been widely used in military, high-altitude shooting, agriculture and other fields in recent years, and have been acquired by various types of sensor units mounted on the aircraft. The required data information, such as the collection of images, enables effective investigation of specific special environments. However, at present, the ground control station of the drone mainly uses the high-power, large-volume PCI bus acquisition technology, which limits the high flexibility of the drone to a certain extent. Therefore, with 32-bit ARM microprocessor as the core and DM368 as the coprocessor, an unmanned aerial vehicle survey system based on embedded real-time, fast data transmission and fast processing speed is designed.
1 system function architecture
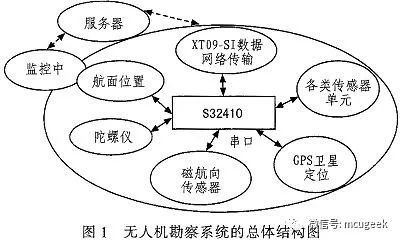
The design of the UAV system consists of three remote sensing technologies: flight control system, wireless communication system and ground control station. The flight process includes the takeoff, flight path, task processing and recovery of the aircraft. The flight control system is designed by the system. core. Figure 1 shows the overall structure of the unmanned aerial vehicle survey system. The sensor unit in the figure consists of a gyroscope, GPS, etc. The radio frequency module XT09-SI is used to transmit the collected information to the ground control station and communicate the control commands of the ground control station to form a flight control-flight management-flight mission implementation. The function of receiving, information processing and information output of the drone is completed, and intelligent and networked are realized.
2 system hardware design
The system is built around the S3C2410 with ARM as the core to build the main control processing module. The small CCD camera and DM368 video co-processing are used to compose audio and video. The wireless radio frequency module XT09-SI is used as the data transmission and receiving channel. The medium is equipped with various sensor units such as GPS, gyroscope and magnetic heading on the UAV to realize accurate acquisition of different data and change of flight trajectory.
2.1 Data Transmission Module
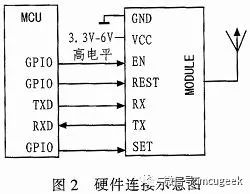
The collection, transmission and reception of data is a complex part of the design of the UAV system. In order to facilitate the function expansion and hardware maintenance in the later stage of the system, a modular design is adopted. The XT09-SI radio frequency module is used as the data transmission module of the circuit. The circuit interface of the wireless transmission module and the microcontroller adopts a serial communication principle, and the hardware connection diagram is shown in FIG. 2 . The data communication uses the standard RS-232 interface, and the high-speed optocoupler isolation 6N137 module is designed to improve the anti-interference ability of the circuit. By receiving the instructions of the ground control station, the flight control, data acquisition and transmission functions of the drone are completed. .
2.2 Image Video Transmission Module
DM368 module is based on ARM 926EJ processor low-power digital multimedia processing chip, DM368 module is used to complete PAL-compliant video standard, can be connected to Flash Memory or FPGA and other devices, support H.264, MPPEG4 and other image coding technology, chip The internal integration of 32 k RAM, 16 kROM, rich external interface and other resources, set image and audio acquisition in one, can be stable and efficient management of data communication, video compression coding and other tasks. Since the video data has deviations at the transmitting end and the receiving end, in order to reduce the error, the H.264 frame image compression encoding algorithm needs to be optimized. The commonly used H.264 processing methods include 4×4 pixels for the region responsible for coding texture and 16×16 pixels with flat regions. The prediction of the frame can be regarded as a simple addition and shift operation to reduce the prediction mode and improve the coding. Effect. The 16x16 pixel prediction mode consists of four modes: vertical prediction, horizontal prediction, DC prediction, and plane prediction. The functions of the four modes are:
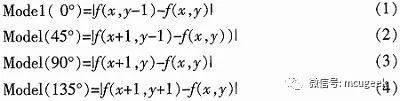
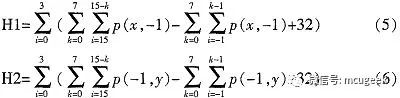
The image frame algorithm of the system uses an adder and a shifter operation for 16x16 pixel predictive coding, which optimizes the calculation equation, reduces the data occupation space, and improves the video transmission efficiency. The algorithm used is as follows:
2.3 main controller module
The main controller of the UAV survey system is equipped with a high-performance, low-power 32-bit core S3C2410, which can operate up to 266 MHz. It has efficient signal processing capability, integrated on-chip resources, and up to 24 external interrupt sources. It can meet multi-channel interrupt processing, improve processor resource utilization, 3-way URAT, I2C, PWM, SPI and other multi-channel communication interfaces. The interface of off-chip memory is extended with Nor Flash and SDRAM, and connected to the microprocessor through bus. , expands the storage data space, and has a high data transmission DAM channel. The S3C2410 chip exchanges data with the XT09-SI wireless module and other sensor unit modules through the SPI interface and the RS-232 interface.
3 software design
In the UAV survey project, the control mode of the ground control station for the UAV includes manual RC operation, remote command control, program scheduled control, etc. The operating system requirements are met to be able to manage multitasking and prioritize. In the current embedded operating system, there are various advantages such as Linux, UC/OS, UC/GUI, etc., all of which have their own advantages. The UAV survey system requires the software to be written reliably and simply. Therefore, the software design of this system uses UCOSII which can manage 64 real-time multitasking kernels. To achieve flight control of drones, software programming focuses on the expansion of the UC/OS operating system architecture and the establishment of an RTOS real-time operating system. The following is a partial schematic code for the operating system.
4 system test
The ground monitoring platform is an important part of the system design. The monitoring center upper computer adopts Qt development. Through Socket programming, it can realize two-way communication between the host computer and the drone control program, and receive the information and transmission control collected by the drone in real time. Command to complete the required mission. The ground monitoring platform can get the data collected by the drones of various sensor units and display them in the window in real time. This experiment allows the drone to perform a simple flight test and the system responds in a timely manner. Figure 3 is part of the information received by the monitoring system.

5 Conclusion
In this paper, an embedded UAV survey system is designed. By introducing the UC/OS real-time kernel, data acquisition, transmission and processing can be completed. The DM368 video co-processing is used to compress and encode the H.264 standard image with high compression ratio. It can capture and transmit stable and high-speed real-time surveyed images and audio. The overall operation of the microcontroller consisting of ARM, low power consumption, high efficiency of data processing, etc. With the continuous development of embedded and sensors, the exploration of drones will be better in military, high-altitude shooting, agriculture and other fields. Development and application.

Click here to immediately participate in the crowdfunding of Zhang Fei four-rotor drone!
Roll Type Condenser
Roll bond evaporators are widely used on refrigerators and Freezers.Evaporator of roll bond are made of two aluminum sheets assembled by a rolling process. Pressurizing the panel to create the channels.There are One Side flat china roll bond evaporator ,Double side inflated roll bond evaporator ,Partial one side flat roll bond evaporator. End of inlet/outlet tube , it is joined with copper tube , which is easy to connect with the whole refrigeration system . Surface of the roll bond evaporator is painted with plastic powder .
Freeze Condenser,Roll Type Condenser,Fridge Condenser Coils,Cold Room Condensing Unit
FOSHAN SHUNDE JUNSHENG ELECTRICAL APPLIANCES CO.,LTD. , https://www.junshengcondenser.com