AI application inventory in robot motion control
The motion control of complex robots has always prevented the development of the robot industry. It has not been well resolved. Even the Boston power that represents the highest level of robotics, its robot is far from practical. The rapid development of AI in the past two years has been used in a variety of places, like natural oils. Naturally, it also includes the field of robot control, and it seems to have achieved good results. At the time of the front-end, Pieter Abbeel, UCberkely’s reinforcement learning expert, founded Embodied Intelligence, and the business directly covers three major hot spots of VR, AI, and robotics.
In order to understand how VR, AI and other new technologies can be applied in the field of robot control, this article has simplified the application of VR and AI in robot control based on a number of related papers and publicly available materials, including Pieter Abbeel's speech, and found AI and VR. There are still real applications in robot control, etc., but there is still a long way to go before a substantial breakthrough is made.
Several types of robot control <br> Many robots have many research goals that simulate human intelligence. Therefore, researching human control systems has great significance for robots. The human nervous system consists of the brain, cerebellum, brainstem, spinal cord, and neurons, and is complex and complete. The human nervous system includes the central nervous system and peripheral nervous system. The central nervous system consists of the brain and spinal cord and is the most important part of the human nervous system. The peripheral nervous system is a nerve distributed from the brain and spinal cord distributed throughout the body. Numerous neurons exist throughout the nervous system and constitute a neural network.
The central nervous system is responsible for motion control and is mainly divided into three layers:
Brain: At the highest level, responsible for the overall planning of the movement, the release of various tasks.
The cerebellum: living in the middle layer, responsible for the coordination of the organization and implementation of the movement. The balance of the human body is controlled by the cerebellum.
Brain stem and spinal cord: The lowest level, responsible for the execution of the movement, specifically controlling the movement of the muscle's skeleton, and is performed by the brain stem and spinal cord.
The three levels have different regulation effects on sports, from high to low, and low level receives high-level downlink control instructions and implement them specifically. The brain can directly or indirectly control spinal motor nerves through the brain stem.
If the robot is analogized to humans, the robotic arm controller is similar to the human spinal cord and is responsible for controlling the specific movement of the motor (muscle) and mechanical mechanism (bone). The motion controller of the multi-legged robot is similar to the human cerebellum. Responsible for controlling balance and coordination. The robot's operating system layer is similar to the human brain, perceives and recognizes the world, and releases various complex sports goals.
Based on the above analogy, referring to the current situation of various types of robots, the robot motion control can be roughly divided into four tasks:
Spinal Cord Control - Basic Control of Robotic Movement. The main problems faced by industrial robots, various types of robotic arms, and the underlying motion control of UAVs are such problems.
Cerebellar control - balance and motion coordination control of multi-footed robots. This piece is currently a difficult point in robot control and has not yet broken through. The best currently being done is obviously Boston Power.
Brain control - the perception of the environment. Primarily, the underlying robots such as sweeping robots and drones control the navigation and path planning of already packaged robots. Need to use environment awareness, positioning, navigation and motion planning for itself and goals.
Brain control - The cognition and interaction of the environment, that is, the robot specifically performs interactive tasks such as controlling the robot arm to grab objects and perform operations. This is an important issue that service robots need to break through.
Several Specific Controlled AI Applications 1. Two typical applications of spinal control spinal control are manipulator path planning and drone flight control. This type of problem belongs to the traditional automatic control theory. Based on mathematics and dynamics modeling, it has been developed for many years. It already has a very complete theoretical and practical foundation, and has also achieved very good results. Although deep learning is hot recently, it can theoretically be used for such control. However, there is no application in this type of basic control. The main reasons may be:
1) Industrial robots can repeat specific actions with high accuracy. Based on the automatic control theory, they can already be solved mathematically well, and because they understand the principle, they belong to the white box system. Since there is a reliable white box solution, there is no need to replace it with a black box neural network control system.
2) Industrial robots and other applications require high stability of control algorithms. As a neural network control system for the black box solution, the data cannot prove its stability. Once a problem occurs in the neural network controller, it is difficult to explain and improve.
3) The neural network algorithm is based on a large amount of data training. However, in existing motion control, such as flight control, the cost of obtaining actual experimental data is high, and it is very difficult to obtain a large amount of data.
2. Cerebellar control The typical problem of cerebellar control is the balance and motion coordination control problem of humanoid bipedal and multipod robots. This aspect has been studied on the basis of traditional control theory. However, it is much more difficult for the freedom of movement compared to the robotic arm or drone. Bipedal robots give most people the impression that they are slow, stiff, and unstable. Boston Power's Altas, Big Dog, etc. are the most advanced in this area. Boston Dynamics has not announced the technology they use, but Google Engineer Eric Jang said that according to the information from the speech, BD's robot control strategy is used. Model-based controllers do not involve neural network-related algorithms.
3. The main scenes of environment perception are the path planning of service robots, the target tracking of drones, and the visual positioning of industrial robots. By perceiving the environment, the motion instructions of the packaged motion control system are issued.
Target recognition The target recognition in the process of environmental awareness, such as the identification and tracking of drone targets, has the help of neural networks, and can be identified more accurately. It has been applied to drones such as Dajiang.
Positioning Navigation and Path Planning Current robot positioning navigation is based on the popular vSLAM or laser radar SLAM technology. The mainstream laser radar program can be divided into three steps. The middle part may involve some deep learning. Most of the content does not involve deep learning.
The first step: SLAM, build a scene map, build a 2D or 3D point cloud of the scene with a laser radar, or reconstruct a 3D scene.
Step 2: Construct a semantic map. Objects may be identified and segmented to mark objects in the scene. (Some may skip this step)
Part III: Path planning based on algorithms and driving the movement of the robot.
4. Environment interaction Typical application scenario: Robotic arm grabs target objects. The interaction with the environment has always been a difficult problem to solve in traditional automatic control. In recent years, on the basis of reinforcement learning, AI-related technologies have been used in such issues and have achieved certain research progress. However, it is still a major controversy whether it is the mainstream direction in the future.
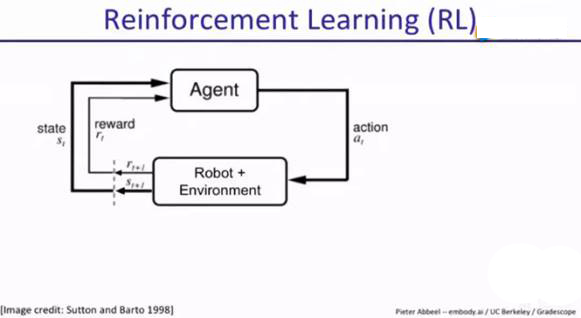
1) Reinforcement Learning In an enhanced learning framework, an agent that includes a neural network is responsible for making decisions. Agent takes the environment collected by the current robot sensor as input, and outputs the action command action that controls the robot. After the robot acts, it observes the new environmental state and the result of the action Reward, and decides the next action action. Reward is set according to the control target and has positive and negative points. For example, if you are aiming for autopilot, the forward Reward is to reach the destination, and the reverse is to fail to reach the destination. The worse Reward is an accident. Then repeat this process with the goal of maximizing Reward.
This way to find things closer to human thinking. The trained controller does not remember the position of the object, and it does not know the structure of the house. But it remembers where to go to each object in each position.
3) Robotic grabbing Traditional robotics studies believe that the three-dimensional geometry of the object to be grasped is very clear, the position and force of the force are analyzed, and then how the robotic hand is moved to these positions step by step. However, it is difficult to grasp irregular shapes and flexible objects in this way. For example, a towel may need to be viewed as a series of rigid links and then subjected to dynamic modeling analysis, but the calculation amount is relatively large. However, rubber such as small yellow duck cannot be seen from the outside and it is difficult to calculate the correct force to be applied.
Pieter Abbeel, DeepMind, and OpenAI's research on robot control is based on this deep reinforcement learning. Based on reinforcement learning, the robot grabs, the image seen from the machine's perspective is input, and the machine finally grasps the object as a goal, and continuously trains the machine so as to implement the model without modeling and force analysis. Grab the object. Pieter Abbeel has shown robots stacking towels, opening caps, loading toys and other complex actions.
However, there are still many problems based on reinforcement learning, such as low efficiency, long reasoning process, difficult to describe the task, can not be lifelong learning, can not get information from the real world. Some of them have improved through the introduction of meta learning, one-shot learning, transfer learning, VR teaching, and others are still difficult to solve.
5.Dexterity Network
Given the various issues of deep reinforcement learning, Ken Goldberg, a colleague of Pieter Abbeel at UC Berkeley, adopted the research idea called Dexterity Network (Dex-Net). First, through the analysis of force and modeling in traditional robotics, a data set containing a large amount of data is created. Each data in this data set contains a model of an object and the object can be grasped steadily in different postures. The way of applying force, these methods of exertion are calculated by the object model. With the data, use this data to train a neural network. Then a new object is given. The neural network determines which object in the data set is the most similar to the object, and then calculates the most stable force of the new object according to the force pattern contained in the most similar object's data set.
An important drawback of Ken Goldberg's plan is that the amount of computation is too large. The entire algorithm takes up 1,500 virtual machine calculations on Google Cloud servers. This method also gives the concept of "cloud robots" attention.
At present, the two methods of Pieter Abbeel and Ken Goldberg are still at the stage of academic controversy. New research results are still emerging, and many problems are still not solved. In particular, stability and robustness are the focus of controversy. Different from the voice recognition speaker, it is nothing more than a joke. The stability and reliability of the robot system are very high. Once the system is wrong, it will destroy the object, and it will cause human life. Pieter Abbeel also acknowledged that the robustness and stability issues have not yet been considered, and it seems that the overall level has not yet reached the commercial product level.
Summary <br> Overall, as represented by reinforcement learning, AI has made some progress in the field of robot control in the past two years, especially in the context of environmental interactions that were difficult to break through in past research methods. However, the control system based on the neural network seems to be difficult to solve in the short-term in terms of robustness and so on, so there is still a long way from the actual application. With the joint efforts of various research methods, we also hope that the robot control problem can be broken at an early date.
In order to understand how VR, AI and other new technologies can be applied in the field of robot control, this article has simplified the application of VR and AI in robot control based on a number of related papers and publicly available materials, including Pieter Abbeel's speech, and found AI and VR. There are still real applications in robot control, etc., but there is still a long way to go before a substantial breakthrough is made.
Several types of robot control <br> Many robots have many research goals that simulate human intelligence. Therefore, researching human control systems has great significance for robots. The human nervous system consists of the brain, cerebellum, brainstem, spinal cord, and neurons, and is complex and complete. The human nervous system includes the central nervous system and peripheral nervous system. The central nervous system consists of the brain and spinal cord and is the most important part of the human nervous system. The peripheral nervous system is a nerve distributed from the brain and spinal cord distributed throughout the body. Numerous neurons exist throughout the nervous system and constitute a neural network.
The central nervous system is responsible for motion control and is mainly divided into three layers:
Brain: At the highest level, responsible for the overall planning of the movement, the release of various tasks.
The cerebellum: living in the middle layer, responsible for the coordination of the organization and implementation of the movement. The balance of the human body is controlled by the cerebellum.
Brain stem and spinal cord: The lowest level, responsible for the execution of the movement, specifically controlling the movement of the muscle's skeleton, and is performed by the brain stem and spinal cord.
The three levels have different regulation effects on sports, from high to low, and low level receives high-level downlink control instructions and implement them specifically. The brain can directly or indirectly control spinal motor nerves through the brain stem.
If the robot is analogized to humans, the robotic arm controller is similar to the human spinal cord and is responsible for controlling the specific movement of the motor (muscle) and mechanical mechanism (bone). The motion controller of the multi-legged robot is similar to the human cerebellum. Responsible for controlling balance and coordination. The robot's operating system layer is similar to the human brain, perceives and recognizes the world, and releases various complex sports goals.
Based on the above analogy, referring to the current situation of various types of robots, the robot motion control can be roughly divided into four tasks:
Spinal Cord Control - Basic Control of Robotic Movement. The main problems faced by industrial robots, various types of robotic arms, and the underlying motion control of UAVs are such problems.
Cerebellar control - balance and motion coordination control of multi-footed robots. This piece is currently a difficult point in robot control and has not yet broken through. The best currently being done is obviously Boston Power.
Brain control - the perception of the environment. Primarily, the underlying robots such as sweeping robots and drones control the navigation and path planning of already packaged robots. Need to use environment awareness, positioning, navigation and motion planning for itself and goals.
Brain control - The cognition and interaction of the environment, that is, the robot specifically performs interactive tasks such as controlling the robot arm to grab objects and perform operations. This is an important issue that service robots need to break through.
Several Specific Controlled AI Applications 1. Two typical applications of spinal control spinal control are manipulator path planning and drone flight control. This type of problem belongs to the traditional automatic control theory. Based on mathematics and dynamics modeling, it has been developed for many years. It already has a very complete theoretical and practical foundation, and has also achieved very good results. Although deep learning is hot recently, it can theoretically be used for such control. However, there is no application in this type of basic control. The main reasons may be:
1) Industrial robots can repeat specific actions with high accuracy. Based on the automatic control theory, they can already be solved mathematically well, and because they understand the principle, they belong to the white box system. Since there is a reliable white box solution, there is no need to replace it with a black box neural network control system.
2) Industrial robots and other applications require high stability of control algorithms. As a neural network control system for the black box solution, the data cannot prove its stability. Once a problem occurs in the neural network controller, it is difficult to explain and improve.
3) The neural network algorithm is based on a large amount of data training. However, in existing motion control, such as flight control, the cost of obtaining actual experimental data is high, and it is very difficult to obtain a large amount of data.
2. Cerebellar control The typical problem of cerebellar control is the balance and motion coordination control problem of humanoid bipedal and multipod robots. This aspect has been studied on the basis of traditional control theory. However, it is much more difficult for the freedom of movement compared to the robotic arm or drone. Bipedal robots give most people the impression that they are slow, stiff, and unstable. Boston Power's Altas, Big Dog, etc. are the most advanced in this area. Boston Dynamics has not announced the technology they use, but Google Engineer Eric Jang said that according to the information from the speech, BD's robot control strategy is used. Model-based controllers do not involve neural network-related algorithms.
3. The main scenes of environment perception are the path planning of service robots, the target tracking of drones, and the visual positioning of industrial robots. By perceiving the environment, the motion instructions of the packaged motion control system are issued.
Target recognition The target recognition in the process of environmental awareness, such as the identification and tracking of drone targets, has the help of neural networks, and can be identified more accurately. It has been applied to drones such as Dajiang.
Positioning Navigation and Path Planning Current robot positioning navigation is based on the popular vSLAM or laser radar SLAM technology. The mainstream laser radar program can be divided into three steps. The middle part may involve some deep learning. Most of the content does not involve deep learning.
The first step: SLAM, build a scene map, build a 2D or 3D point cloud of the scene with a laser radar, or reconstruct a 3D scene.
Step 2: Construct a semantic map. Objects may be identified and segmented to mark objects in the scene. (Some may skip this step)
Part III: Path planning based on algorithms and driving the movement of the robot.
4. Environment interaction Typical application scenario: Robotic arm grabs target objects. The interaction with the environment has always been a difficult problem to solve in traditional automatic control. In recent years, on the basis of reinforcement learning, AI-related technologies have been used in such issues and have achieved certain research progress. However, it is still a major controversy whether it is the mainstream direction in the future.
1) Reinforcement Learning In an enhanced learning framework, an agent that includes a neural network is responsible for making decisions. Agent takes the environment collected by the current robot sensor as input, and outputs the action command action that controls the robot. After the robot acts, it observes the new environmental state and the result of the action Reward, and decides the next action action. Reward is set according to the control target and has positive and negative points. For example, if you are aiming for autopilot, the forward Reward is to reach the destination, and the reverse is to fail to reach the destination. The worse Reward is an accident. Then repeat this process with the goal of maximizing Reward.
The control process of reinforcement learning is originally a positive feedback control process and is the basis of AI for robot control. Based on this, reinforcement learning has produced some research results in robot control.
2) In the context of finding goals in the environment for 16 years, the Li Feifei group released a paper based on deep reinforcement learning. When the target image is used as input, no map is built to find things. The general idea is: According to the map seen by the machine, decide how to go, and then look at the map, and then decide the new step, until you find something. The paper takes the target image as input, and the trained neural network has universality.This way to find things closer to human thinking. The trained controller does not remember the position of the object, and it does not know the structure of the house. But it remembers where to go to each object in each position.
3) Robotic grabbing Traditional robotics studies believe that the three-dimensional geometry of the object to be grasped is very clear, the position and force of the force are analyzed, and then how the robotic hand is moved to these positions step by step. However, it is difficult to grasp irregular shapes and flexible objects in this way. For example, a towel may need to be viewed as a series of rigid links and then subjected to dynamic modeling analysis, but the calculation amount is relatively large. However, rubber such as small yellow duck cannot be seen from the outside and it is difficult to calculate the correct force to be applied.
Pieter Abbeel, DeepMind, and OpenAI's research on robot control is based on this deep reinforcement learning. Based on reinforcement learning, the robot grabs, the image seen from the machine's perspective is input, and the machine finally grasps the object as a goal, and continuously trains the machine so as to implement the model without modeling and force analysis. Grab the object. Pieter Abbeel has shown robots stacking towels, opening caps, loading toys and other complex actions.
However, there are still many problems based on reinforcement learning, such as low efficiency, long reasoning process, difficult to describe the task, can not be lifelong learning, can not get information from the real world. Some of them have improved through the introduction of meta learning, one-shot learning, transfer learning, VR teaching, and others are still difficult to solve.
5.Dexterity Network
Given the various issues of deep reinforcement learning, Ken Goldberg, a colleague of Pieter Abbeel at UC Berkeley, adopted the research idea called Dexterity Network (Dex-Net). First, through the analysis of force and modeling in traditional robotics, a data set containing a large amount of data is created. Each data in this data set contains a model of an object and the object can be grasped steadily in different postures. The way of applying force, these methods of exertion are calculated by the object model. With the data, use this data to train a neural network. Then a new object is given. The neural network determines which object in the data set is the most similar to the object, and then calculates the most stable force of the new object according to the force pattern contained in the most similar object's data set.
An important drawback of Ken Goldberg's plan is that the amount of computation is too large. The entire algorithm takes up 1,500 virtual machine calculations on Google Cloud servers. This method also gives the concept of "cloud robots" attention.
At present, the two methods of Pieter Abbeel and Ken Goldberg are still at the stage of academic controversy. New research results are still emerging, and many problems are still not solved. In particular, stability and robustness are the focus of controversy. Different from the voice recognition speaker, it is nothing more than a joke. The stability and reliability of the robot system are very high. Once the system is wrong, it will destroy the object, and it will cause human life. Pieter Abbeel also acknowledged that the robustness and stability issues have not yet been considered, and it seems that the overall level has not yet reached the commercial product level.
Summary <br> Overall, as represented by reinforcement learning, AI has made some progress in the field of robot control in the past two years, especially in the context of environmental interactions that were difficult to break through in past research methods. However, the control system based on the neural network seems to be difficult to solve in the short-term in terms of robustness and so on, so there is still a long way from the actual application. With the joint efforts of various research methods, we also hope that the robot control problem can be broken at an early date.
General Purpose Servo Motors,Cnc Lathe Electric Motors,Cnc Lathe Servo Motor,Servo Motor For Sewing Machine
Zhejiang Synmot Electrical Technology Co., Ltd , https://www.synmot-electrical.com